📍 1. 調査
1.1 概 要
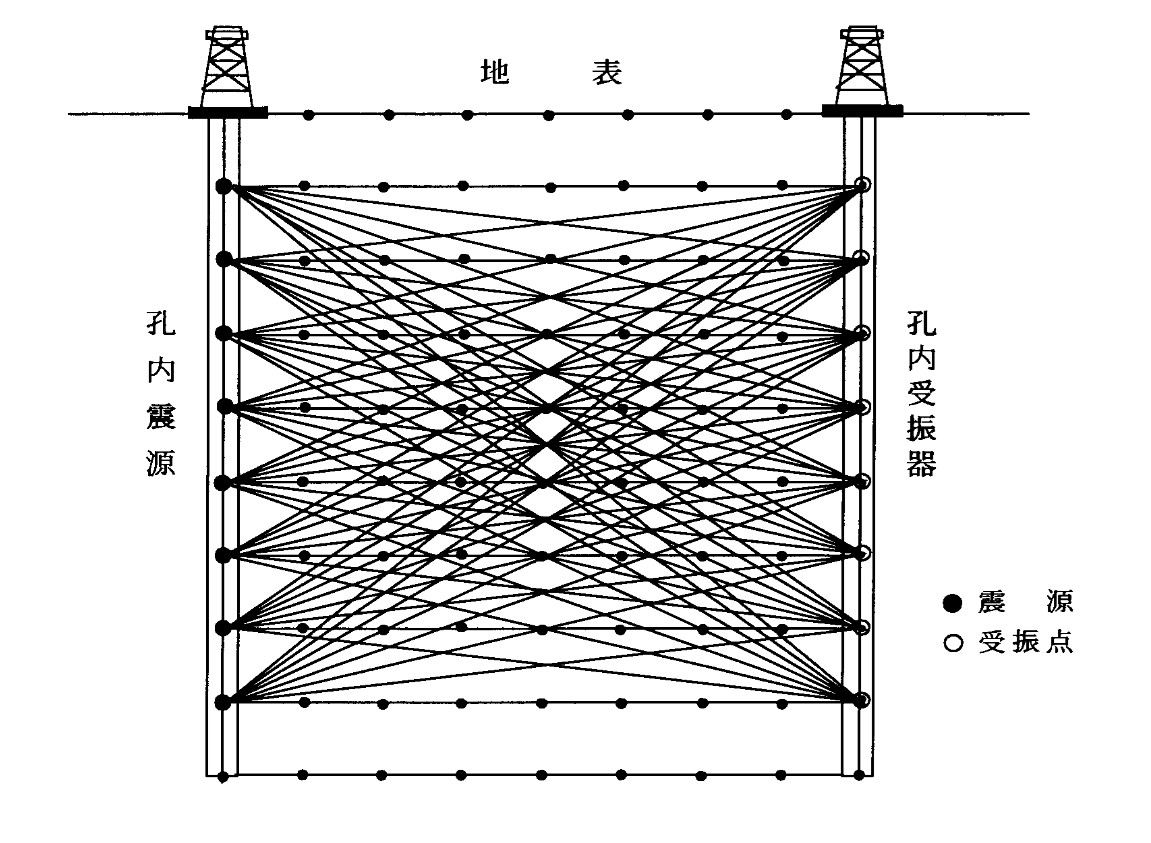
孔間トモグラフィー(弾性波)は、ボーリング孔-孔間、ボーリング孔-横坑間、ボーリング孔-地表間で震源と受振器を解析領域を取り囲むように配置し、
発破等による震源から地盤内部を伝播する弾性波の走時を多数測定して、地下の速度分布を推定する手法です。
速度場の離散化には、セル分割法と格子点法があり、波線の屈曲を合理的に扱える格子点法を本調査では採用します。
1.2 測定
地表面下に起振点/震源(●印)と受振点(〇印)を配置し、解析空間には速度計算のための格子点を設定します。受振点は5 m 間隔、
起振点は10~15 m 間隔を目安に配置します。起振には発破を使用し、波線が解析領域全体をカバーするように配列を計画します。
受振器には固有周波数 28 Hz の動電型受振器を用い、データはIFP付地震探鉱器でディジタル記録します。
格子点は浅部ほど密、深部ほど粗となるように設定します。
📊 2. 解析
2.1 概 要
観測走時から弾性波速度を推定する逆解析(インバージョン)を行います。順解析には、
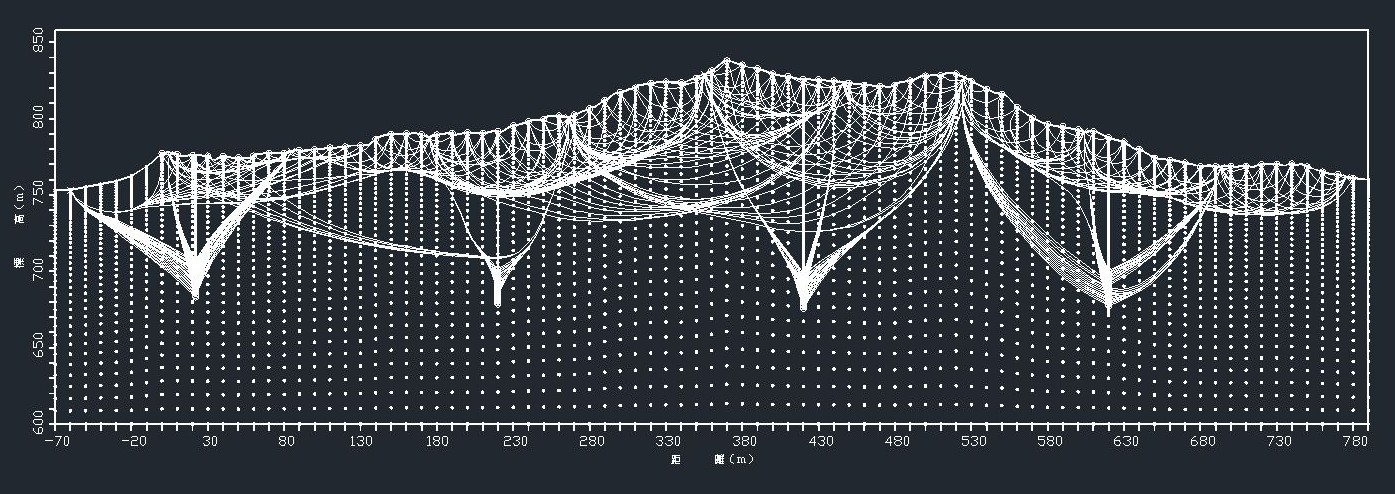
格子構造に柔軟な改良STP法(Shortest Travel-time Path)を用いた波線追跡、
逆解析には拡張ベイズ法を採用します。
2.2 速度場の設定と波線追跡
風化の影響で地盤は不均質で、特に表層は速度が小さく変化も大きい領域です。表層の表現精度が深部解像度へ影響するため、
格子点は浅部を高密度、深部を等比級数的に疎に配置します。等間隔格子上のSTP法を、正規化座標と形状関数の導入で
不規則格子へ拡張して波線追跡を行います。
2.3 事前情報
走時インバージョンは感度領域が限られるため、以下の事前情報を併用します。
- 隣接点の確率的関係(マルコフランダム場、等方/異方の構造性)
- 地質構造・物性の既知情報(ハギ取法の解析結果など)
2.4 解析
- 走時曲線の作成・調整(屈折走時の条件を満たすよう整備)
- 格子構造図の作成(地形・地質に適合)
- 初期値と予測モデルの設定(深部ほど速度増加)
- 波線追跡により走時とヤコビアンを計算
- 観測値・理論値・事前情報から評価関数を構成
- 最小化(ハウスホルダー法等)により最適パラメータを推定
- 収束判定(評価関数変化が閾値以下で停止)
- 残差・分散・分解能行列による妥当性と不確実性評価